

Bislang sind Künstliche Intelligenzen alles andere als intelligent. Vielmehr sind es spezialisierte Systeme und Programme, die zwar komplexe Entscheidungsprozesse und fokussierte Analysen vollziehen können – aber eben nur für eine einzige Aufgabe. Vor allem für Roboter, die selbstständig in städtischen Umgebungen agieren sollen, ist das nicht genug. Daher wollen Forscher der University of Washington und des Allen Institute for Artificial Intelligence nun ein Künstliches Neuronales Netze von echten Lebewesen lernen lassen: nämlich Hunden.
„Hunde haben eine viel begrenztere Aktionsspanne als, sagen wir, Menschen“ heißt es in der Who Let The Dogs Out? getauften Studie. „Dennoch zeigen sie eine klare visuelle Intelligenz.“ Vor allem, weil ihre Motivationen für ihr Verhalten unbekannt seien, wären ihre Aufnahmen laut den Forschern besonders gut für ein Training von KI-Systemen geeignet.
Die Wissenschaftler zeichneten zahlreichen Szenen mit einem Alaskan Malamute Hund namens Kelp auf. Insgesamt entstanden 380 Videos. Gefilmt wurden sie mittels einer GoPro-Kamera, die dem Hund direkt auf den Kopf geschnallt wurde. Unter anderem zeigen die Videos Kelp beim Gassi gehen, beim Fressen und beim Ballspielen mit seinem Frauchen. Dazu kamen zusätzliche Daten über die Bewegungsabläufe des Hundes, die mit Sensoren am ganzen Hundekörper protokolliert und anschließend auf ein digitales Modell übertragen wurden – ähnlich wie bei Motion-Capture-Aufnahmen für Videospiele und Filme.
Der umfangreiche Datenberg wurde in ein Künstliches Neuronales Netz eingespeist, damit es aus den Video- und Bewegungsdaten „lernt, wie sich ein Hund verhält.“ Danach gelang es dem System, die Bewegungen des Hundes in neuen Situationen vorauszusagen. Zeigte ein Foto einen Ball, konnte die Künstliche Intelligenz bestimmen, dass der Hund ihm mit hoher Wahrscheinlichkeit nachjagen würde. Nachdem dieser Schritt erfolgreich war, sollte das Neuronale Netz auch Erkenntnisse abseits des Hundelebens sammeln.
Tatsächlich erlangte die KI eine rudimentäre Cleverness. Sie konnte begehbare Bodenflächen, offene und geschlossene Bereiche und auch verschiedene Hindernisse identifizieren. Zwar nur in einem sehr engen Rahmen, der dennoch aussichtsreich erscheint. Denn diese Erfahrungswelt eines Hundes konnte allein aus Video- und Bewegungsdaten abgeleitet werden. Beispielsweise dass befahrene Straßen und Springbrunnen zu meiden sind, Bürgersteige und gemähte Grasflächen in Parks zu bevorzugende Wege darstellen oder dass Radfahrer oft von selbst ausweichen.
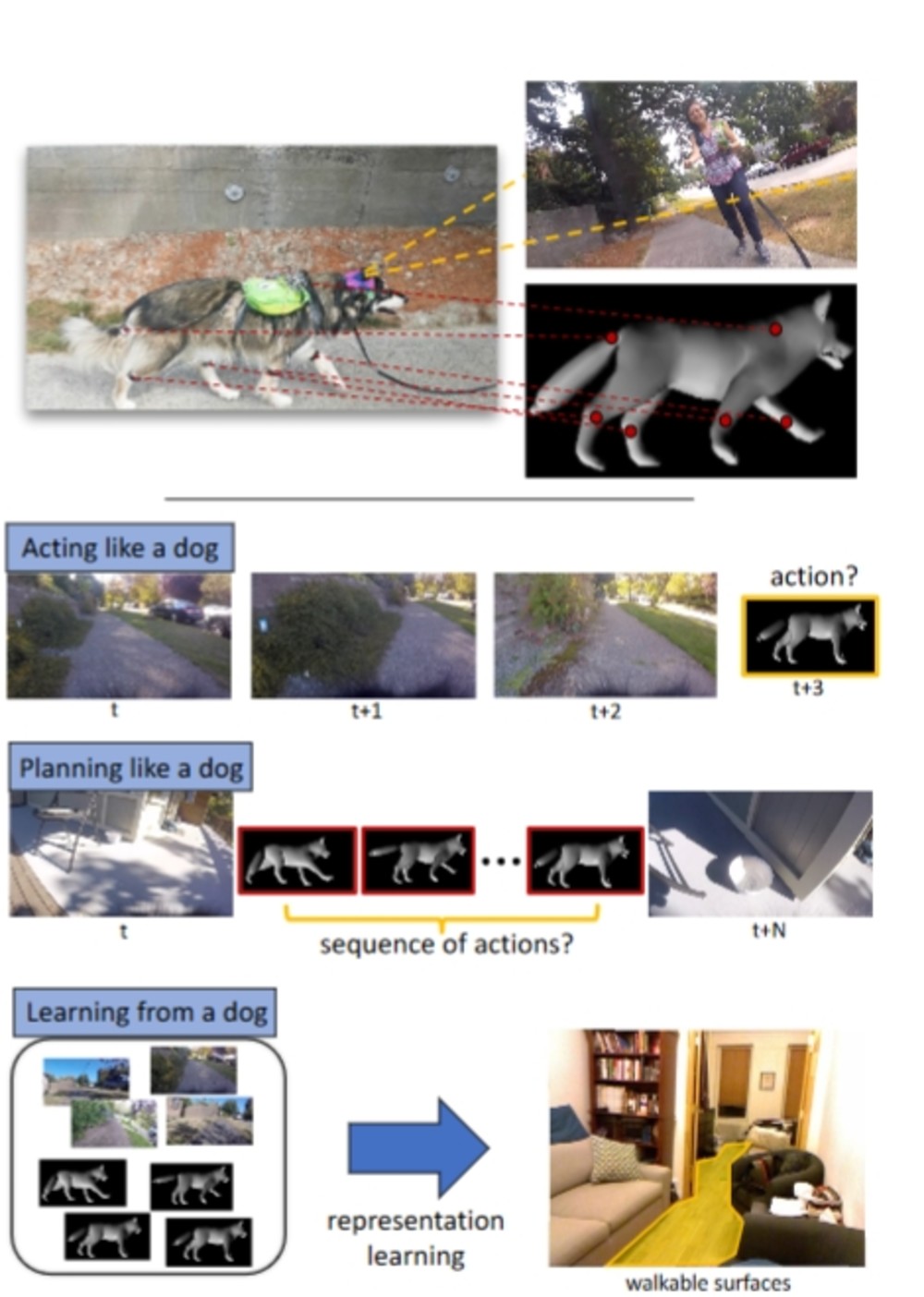
Nach dem Training konnte das Neuronale Netz unter anderem „begehbare Oberflächen“ identifizieren. Etwas, das Robotern bisher zumeist noch schwer fällt.
Die Arbeit der Forscher könnte benutzt werden, um Systeme wie den Robo-Hund Spot von Boston Dynamics oder das autonome Lieferfahrzeug Starship zu trainieren. Bisher mussten deren Regelwerke aufwändig von Hand programmiert werden. Dadurch könnten diese Maschinen nicht nur smarter werden, sondern auch ein Verhalten lernen, dass für Menschen nachvollziehbarer ist. Weil sie es eben von Hunden bereits ähnlich kennen.



{kind=link}